Jayjun Lee
Welcome! I'm a PhD student in Robotics at the University of Michigan and a Robotics research intern at the Dexterity team at NVIDIA.
I'm fortunate to be advised by Professor Nima Fazeli
and to be a member of the Manipulation and Machine Intelligence (MMINT) Lab.
My research focuses on robot learning and dexterity to develop robots that can perceive and interact with the physical world.
I graduated from Imperial College London where I received my BEng in Electronic and Information Engineering.
Previously, I worked with Professor Ad Spiers in the Manipulation and Touch Lab.
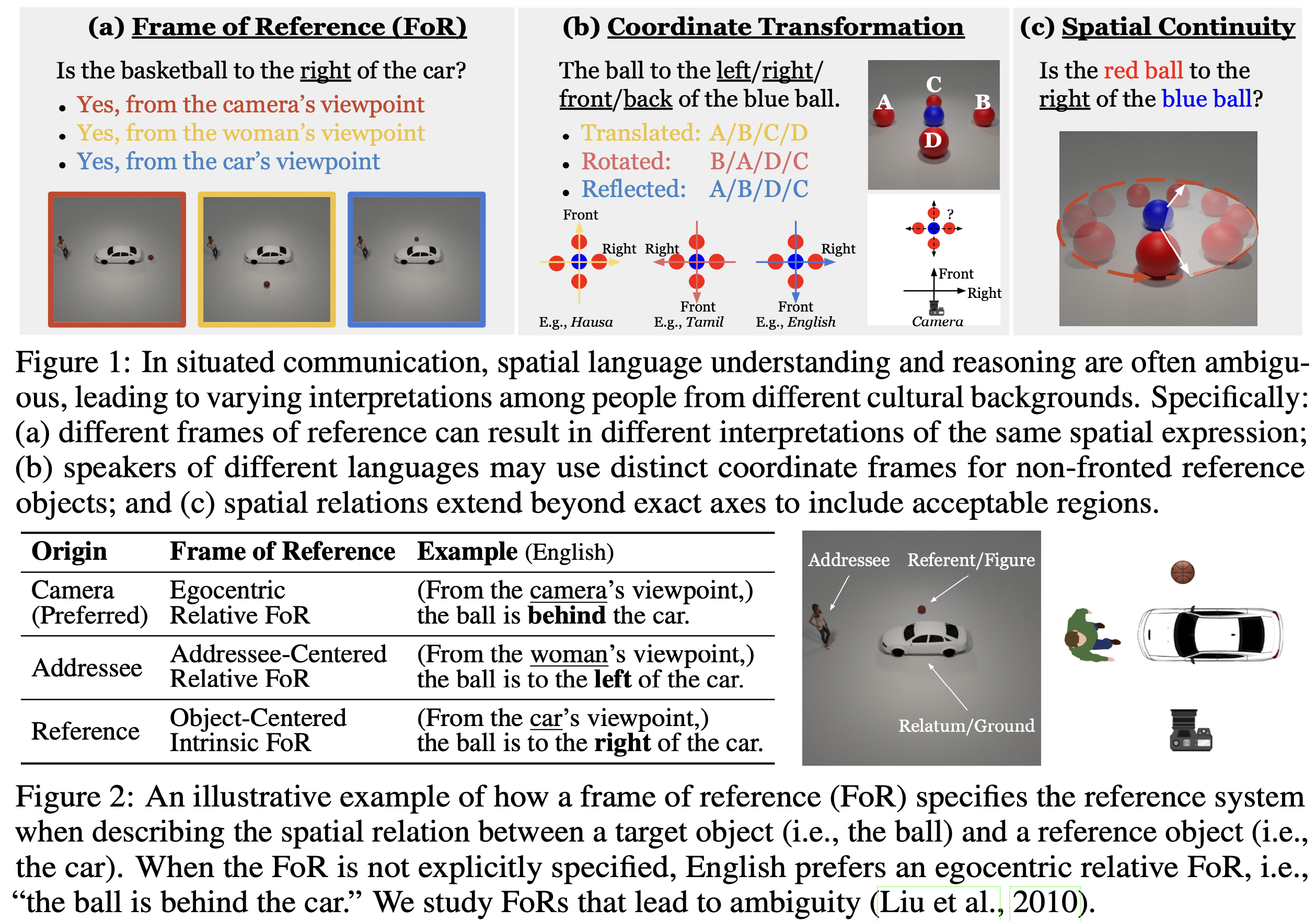
I also worked with Professor Joyce Chai in the Situated Language and Embodied Dialogue (SLED) Lab and
Professor Cindy Chestek in the Cortical Neural Prosthetics Lab.
Github
Google Scholar
Twitter
Email:
[unscramble]
Jan. 2026
VA2Contact is accepted to ICRA 2026 in Vienna, Austria!Jan. 2026
I joined the Dexterity team at NVIDIA as a Robotics research intern!Sep. 2025
I'm co-organizing Human-to-Robot workshop at CoRL 2025!Aug. 2025
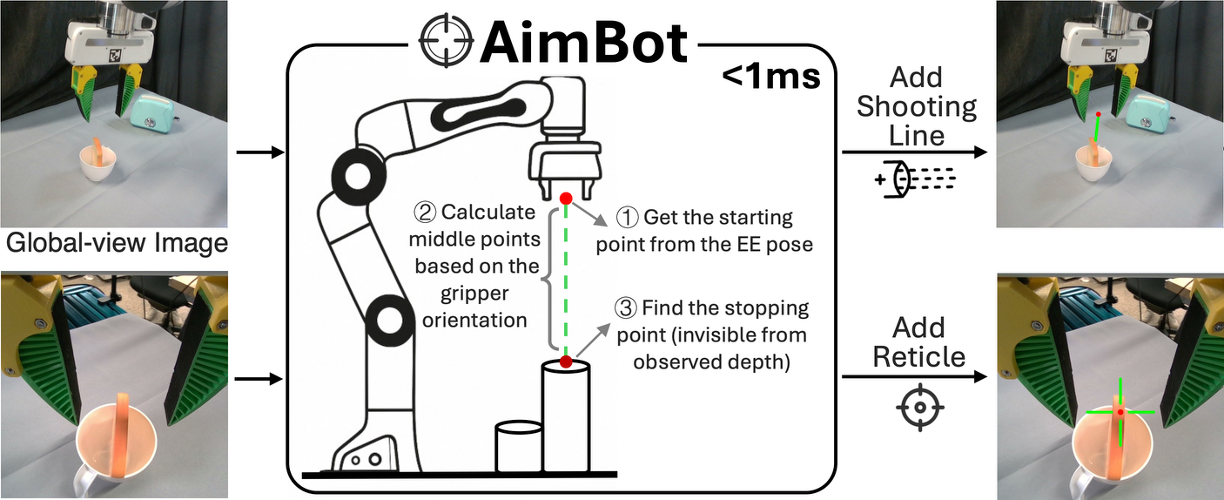
AimBot is accepted to CoRL 2025 in Seoul, Korea!Apr. 2025
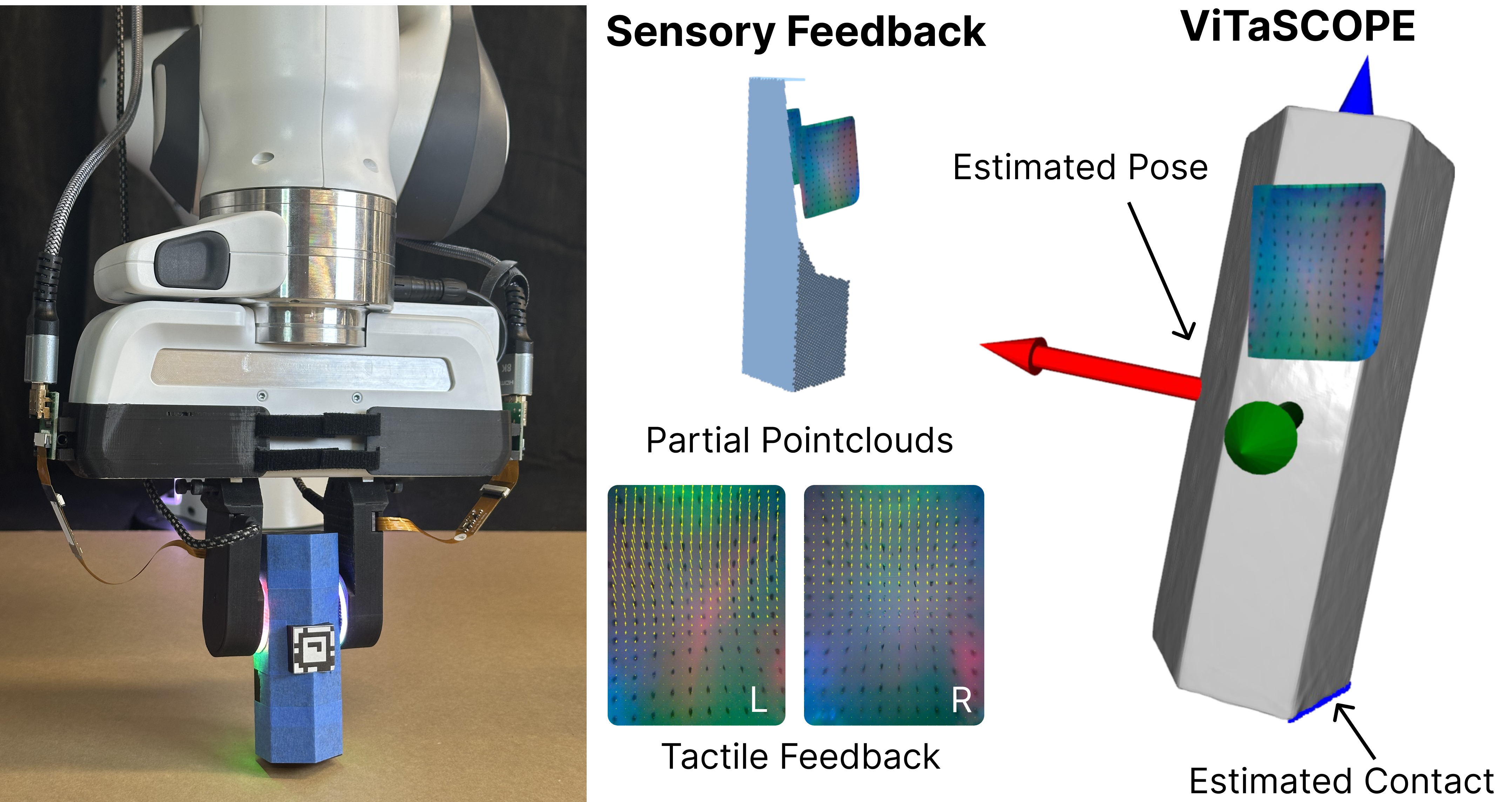
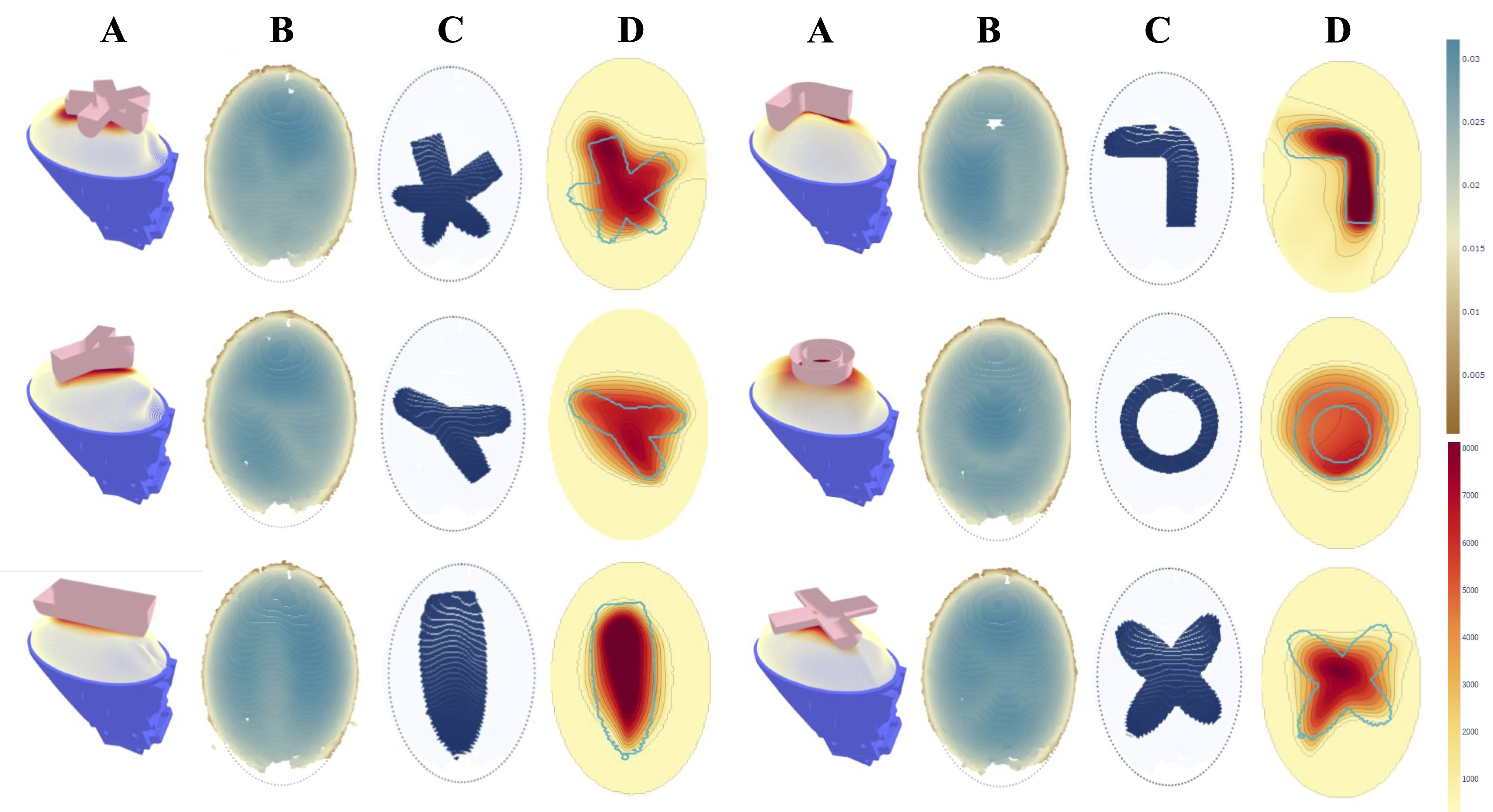
ViTaSCOPE is accepted to RSS 2025 in Los Angeles!
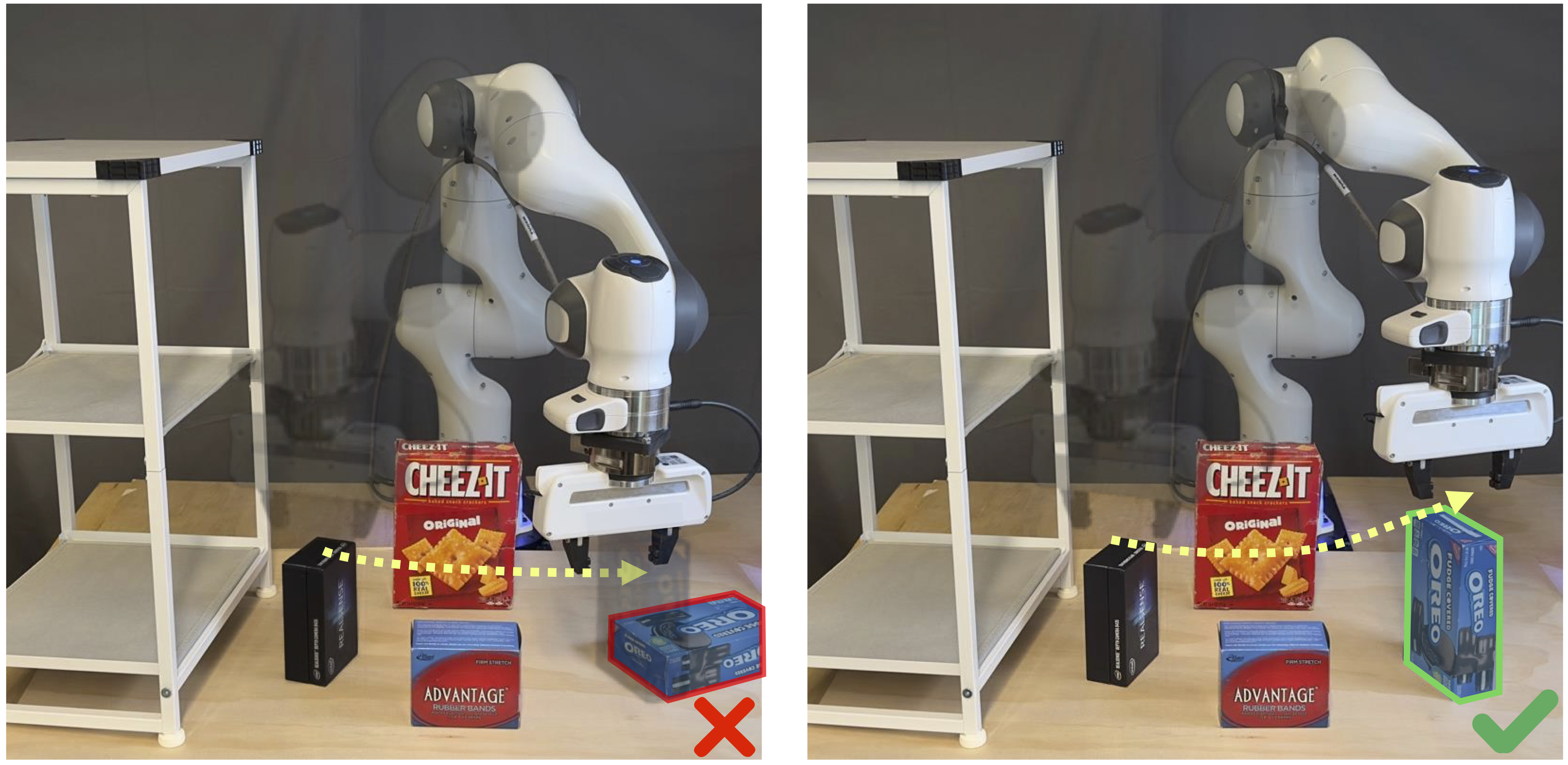
RACER: Rich Language-guided Failure Recovery Policies for Imitation Learning
*,
*,
, and
★ Best Overall Award @ UM AI Symposium 2024 ★
The 3rd Workshop on Language and Robot Learning (LangRob) @ CoRL 2024
International Conference on Robotics and Automation (ICRA) 2025
Webpage
Paper
Code
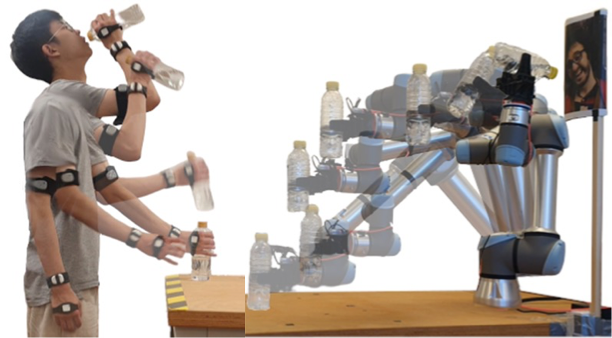
Naturalistic Robot Arm Trajectory Generation via Representation Learning
and Adam Spiers
UK-RAS Towards Autonomous Robotic Systems (TAROS) 2023
PDF